ロボットに必要なのはコードだけではない——それは「経験」でもある。

ノイトムロボティクス 創業者 兼 最高経営責任者 戴若犁(Dr. Tristan Dai)
人工知能(AI)について語るとき、私たちの議論はしばしばアルゴリズム、計算能力、そしてモデルのアーキテクチャに戻ります。
しかし、現実世界で生き、環境と相互作用する「具身型AI(Embodied AI)」において、本当に重要な要素は、より巨大なモデルではありません。
鍵となるのは「より良い経験(エクスペリエンス)」なのです。
ロボットにとっての「経験(すなわち事前知識)」とはデータのことです——しかも、ただのデータではありません。
それは、人間が現実の環境の中で実際に動くときにのみ得られる、視覚・聴覚・運動・触覚が精密に同期した高忠実度の情報、
言い換えれば「現実世界のマルチモーダルデータ」なのです。
ロボットがまだ手にしていないデータ
ロボットは、シミュレーションの中では驚くほど優秀な学習者です。
私たちは完璧な3D環境をレンダリングし、何百万回もの試行錯誤を繰り返し、数カ月分の訓練をわずか数時間に圧縮することができます。
しかし、そのロボットがシミュレーションを離れ、予測不可能で騒がしく、絶えず変化する人間の世界に足を踏み入れた途端——つまずくのです。
この「つまずき」には名前があります。それが シム・トゥ・リアルギャップ(Sim-to-Real Gap) です。
このギャップとは、シミュレーションという完璧で制御された環境と、現実世界の雑然とした、センサーに満ちた複雑さとの間にある隔たりを指します。
太陽光でカメラはフレアを起こし、床はきしみ、物体は想定通りの位置にない。
そして人間の行動は、どんなに高度なシミュレーションであっても完全には予測できません。
Sim-to-Real問題 は、今日のロボティクス分野で最も大きな課題のひとつです。
そして、このギャップを埋めるために必要なのは、より優れたシミュレーターではありません。
それは「現実世界での経験」なのです。
データの不足から、データの質へ
現在のロボット産業において、ボトルネックとなっているのは単なる「データ量」ではなく、「データの質」です。
多くのロボットはいまだに、不完全で整合性の取れていないデータストリームから学習しており、
エンジニアたちは不足する文脈を推測で補わざるを得ない状況にあります。
シミュレーションは一部のギャップを埋めることができますが、現実の予測不可能性を完全に再現することはできません。
Sim-to-Realギャップを解消するということは、ロボットが実際に活動する環境を忠実に反映した、
本物のマルチモーダルな体験データを与えるということなのです。
だからこそ、**ノイトムロボティクス(Noitom Robotics)**は、
このようなデータを継続的かつ効率的に収集・活用できるパイプラインの構築に注力しています。
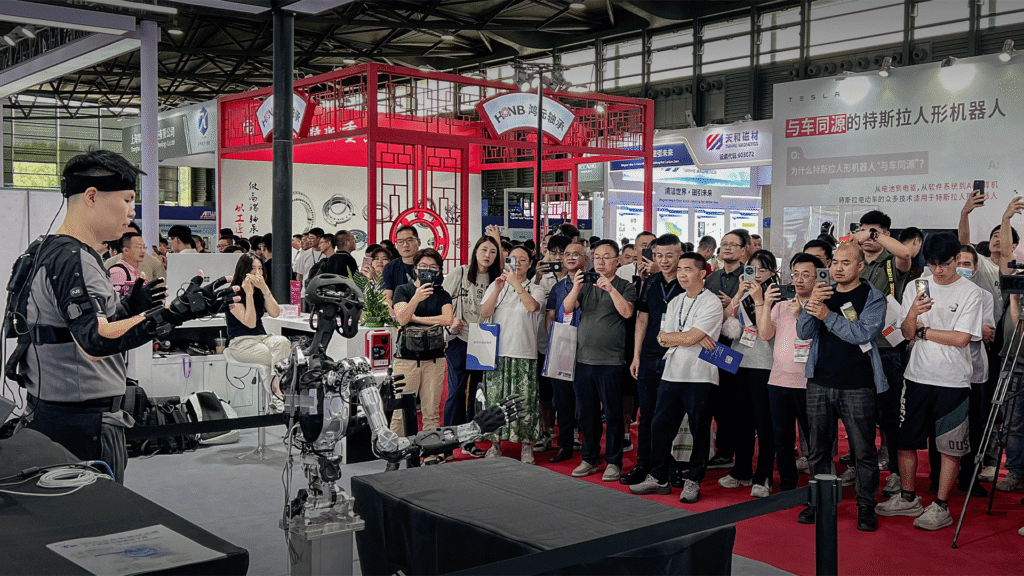
私たちの研究開発は、テレオペレーション(遠隔操作)、人間からロボットへの動作マッピング、
そしてクロスプラットフォーム統合といった分野にわたり、
すべては「ロボット開発者に、最も豊かで実用的な感覚体験データを提供すること」——その一点に向かっています。
最終目標:本能
本能」を持つロボットは、単に反応するだけではありません——予測するのです。
物体が滑りかけた瞬間に握りを調整し、
人が進路に入れば速度を落とし、
昨日開けた引き出しが今日も開いたままであることを“覚えている”。
こうした本能は、ハードコードされたルールによって生まれるものではありません。
それは、人間と同じように、ロボットが現実世界で十分な相互作用を経験することで初めて芽生えるものです。
そのためには、継続的に「本物のマルチモーダルな経験」を与え続けることが不可欠なのです。
ノイトムロボティクス(Noitom Robotics)が取り組んでいるのは、ロボットそのものの製造ではありません。
私たちが構築しているのは、人間の能力と機械の自律性をつなぐ「橋」——
つまり、物理的なハードウェアを「理解し、適応し、そして人間の世界に溶け込む存在」へと変えるためのデータなのです。
なぜなら、究極的に言えば——
知能とは、経験を精錬したものにほかならないからです。
お問い合わせください
具身型AIの開発に取り組み、「いかにしてシステムに“生きた経験”を与えるか」という課題に直面している方は、ぜひ私たちと話しましょう。
この課題こそが、ノイトムロボティクスが情熱を注いで取り組んでいるテーマです。
メールでのお問い合わせ先:contact@noitomrobotics.com