次なるトレーニングセット——具身型AIのための「社会的文脈」の収集

ノイトムロボティクス 最高マーケティング責任者(CMO)
ロッシュ・ナカジマ(Roch Nakajima)
ロボットの居場所を決めるのは、安全基準だけではない——それを左右するのは「社会契約」である
ハノイでは、歩道から一歩踏み出しても、一定の速度で歩き続ければいい。
スクーターたちはまるで水流のように、その隙間をすり抜けていく。
一方、東京ではそうはいかない。赤信号なら止まり、青信号で渡る——たとえ交差点に誰もいなくても。
どちらの行動も合理的であり、それぞれの街がもつ**社会契約(ソーシャル・コントラクト)**に根ざしたルールなのです。
ベトナムの道路は二輪車が主役で、「交渉的な流れ(negotiated flow)」が日常の秩序。
対して日本の道路は、秩序と予測可能性によって構築されており、
歩行者には「待つこと」が法的にも社会的にも期待され、その通りに行動する人がほとんどです。
優劣の問題ではなく、どちらも一貫した社会的ロジックを持つということ。
そして、まさにその違いこそが——私たちの機械が読み取れるようにならなければならないものなのです。
誤解のないように言えば、横断歩道の話はあくまで一例です。
本質的な問いはもっと大きい——
それは、ロボット(あるいは広義の自律システム)が、状況ごとに「その土地の社会契約」を理解し、順応できるかどうかということ。
それは人とロボットの関係だけでなく、ロボット同士の関係にも関わります。
パリのカフェで働くバリスタロボットは、ロサンゼルスのそれと同じ振る舞いをすべきでしょうか?
信頼と受容を得たいのなら、答えは——ノーです。
科学が示す事実——「文化」は行動を決定づける
社会的規範は普遍的なものではありません。
それは、「厳格な文化(tight culture:強い規範・逸脱への低寛容)」と「寛容な文化(loose culture:緩い規範・逸脱への高寛容)」の間で大きく異なります。
これは単なる机上の社会学ではなく、国際的な実証研究によって裏づけられた事実です。
そして、数百万人規模の人々に「自動運転車が倫理的なジレンマに直面したとき、どのように行動すべきか」を尋ねると、
その回答は文化圏ごとに明確にクラスター化します。
もし社会規範や期待が文化によって異なるのなら、AIが示すべき「善き振る舞い」もまた、文化ごとに異ならなければならないのです。
機械にとっての「マナー」とは何か
ロボットにおける社会契約は、空間・タイミング・サイン・言葉といった形で現れます。
- どの距離まで近づいて通過してよいか——パーソナルスペースや歩行・移動時の隊列形成のルール。
- いつ譲り、いつ「隙間を抜ける」べきかというタイミングの感覚。
- 動作の前に視線を合わせるか、うなずくか、声で合図するか。
- カウンターで雑談を交わすべきか、簡潔に済ませるべきか、あるいはチップを求めること自体が適切かどうか——こうしたすべてが、ロボットにとっての「マナー」を形づくります。
人とロボットのインタラクション(HRI)研究もこれを裏づけています。
ロボットが文化的に調整された社会的サインやその場に応じたナビゲーション行動を示すとき、
人々はより積極的に関わり、そして不満を抱くことが少なくなるのです。
「社会的認知型ナビゲーション(Socially Aware Navigation)」という研究分野が存在するのは、
画一的で硬直したルールでは、現実の群衆や多様な社会的文脈に対応できないからにほかなりません。
ルールだけでは不十分——ロボットには「経験」が必要だ
交通ルールや安全マージンは必要不可欠です。
しかし、それだけでは不十分です。
この業界はすでに、そのことを痛感してきました——
どれほど完璧なルールを定義しても、現実の環境ではぎこちなく、脆い挙動を示すことがあるのです。
それを変えるのは、実体験に基づくマルチモーダルな経験です。
視覚・聴覚・運動・触覚といった感覚が現実環境の中で同期的に記録され、
そこから「習慣」として抽出・学習されること。
ノイトムロボティクス創業者の戴若犁博士が述べたように、
「ロボットに必要なのはコードの量ではなく、より豊かな“経験”」なのです。
つまりこれは、アルゴリズムの前に存在するデータの課題です。
ノイトムロボティクスでは、まさにこのレイヤーに焦点を当てています。
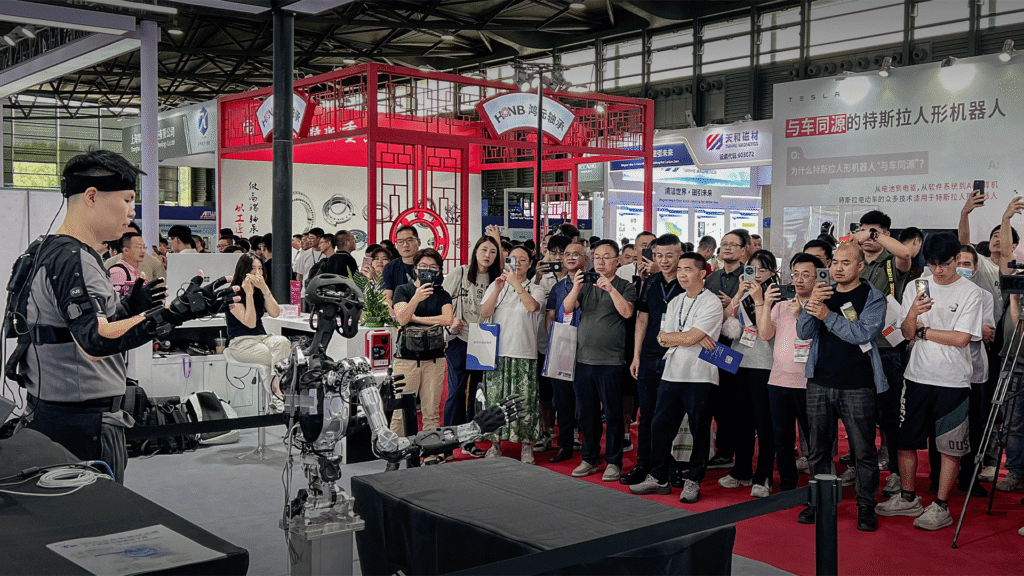
高忠実度で同期された人間と環境のインタラクションデータの収集パイプライン、
そしてロボットが即興的に振る舞う前に、安全に“地域の規範”を練習できるテレオペレーションループ。
具身型AIにおいて、動作を意味に変えることこそが、
「シミュレーションの中で動く」から「人間社会に溶け込む」への架け橋なのです。
パリ対ロサンゼルス——バリスタ・テスト
パリでは、サービス料(service compris)は基本的に価格に含まれており、チップは控えめ、もしくは任意であることが多い。
もっとも、近年では観光客の増加に伴い、カード端末による「チップの促し」が少しずつ行動変化を生みつつあります。
一方アメリカでは、チップは期待されるものでありながら、その文化的是非をめぐって議論が絶えません。
支払い時のプロンプト表示そのものが、しばしば利用者の不満を引き起こすことすらあります。
もしロボットがこの二つの市場を同じ設計思想で扱うなら、その一方では確実に「空気の読めない存在」になってしまうでしょう。
実践的な教訓は明快です。
支払いと会話のフロー設計は、カプチーノのミルクを泡立てるときと同じくらい丁寧に、
その土地の文化的文脈に合わせて行うべきなのです——
どのように促すか、どう尋ねるか、雑談を交わすか否か、すべてが「社会的デザイン」の一部なのです
ロボット同士の「社会契約」の時代も、すぐそこまで来ている
これは、人間との関係だけの話ではありません。
複数の自律システムが同じ空間を共有する時代において、
彼らには単なる**通信プロトコルを超えた“慣習(コンベンション)”**が必要になります。
すでに、自動運転車同士が通信によって合流や非保護左折の優先交渉を行う研究が進んでいます。
マルチエージェント環境では、明示的にプログラムされていなくても社会的規範(ノーム)が自然発生し、
時には変化(ドリフト)することがあるのです。
都市ごとに「厳格(tight)」か「寛容(loose)」かという文化的特徴があるように、
ロボット同士のエチケットもまた、環境に合わせて適応すべきです。
たとえば——
どの程度の強さで間に割り込むか、
どのタイミングで相手を先に通すか、
そしてそれらのやり取りを人間が監査できる言語や仕草でどう表現するか。
これらはすべて、これからの時代におけるロボット同士の社会契約を形づくる要素なのです。
ローカルな「マナー」をロボットに組み込むためのプレイブック
すべての導入現場を社会学の博士研究にしてしまわずに、
こうした「社会的ふるまい」を実装に落とし込むための現実的なアプローチは次のとおりです。
- 安全スタックだけでなく、文化オーバーレイを搭載せよ。
ロボットOSに「社会的ふるまい(social behavior)」レイヤーを追加します。
たとえばパーソナルスペース(proxemics)、歩行リズム、譲り方、視線や発話パターンなどを、都市・施設・時間帯ごとに設定可能にするのです。
これは「ロケールパック」として扱い、バージョン管理とテストが可能な設計にします。
社会的ナビゲーション研究から得られる行動のヒントを、現地データに根づかせるのが開発者の役割です。 - ハイパーローカルでマルチモーダルなデータで訓練せよ。
その場所での「礼儀正しさ」とは何かをデータで捉えます。
歩行者の流れ、音の風景、空間を譲り合うときの微細なジェスチャーなどを、視覚・動作・音声・力覚の同期ストリームとして収集し、データファクトリーに組み込みます。
ルールではなく、現地での経験から学ぶのです。 - 意図的に「人間をループに残す」。
自動運転車と同様、多くの具身システムは長期間にわたり遠隔支援に依存します。
そのため「ロボット・コールセンター」を設け、現地のオペレーターがロボットを地域社会の社会契約へと導くよう支援します。
その介入データをトレーニングに再利用し、オペレーター対ロボット比率をKPIとして継続的に改善します。 - 文化適合性と倫理リスクを監査せよ。
文化圏によって倫理的判断の傾向は異なります。
地域ごとの価値観に沿ってロボットの行動を調整するためのデプロイメント倫理チェックリストを作成します。
同時に、バイアスの固定化を防ぎ、「モラル・コロニアリズム(倫理の植民地主義)」を避ける設計にします。
安全性や法令遵守を担保しつつ、地域の規範をデフォルト行動として尊重することが重要です。
最後に──ハノイと東京について一言。
横断歩道の例は、あくまで本質をわかりやすく示すための比喩にすぎません。
ベトナムでは、車両の大半を占める二輪車中心の交通生態系が、流れるような「交渉型」の動きを合理的に支えています。
一方、日本の交通体系は、ルールが視覚化された協調と歩行者信号への厳密な従順を重んじています。
どちらの方式も、参加者全員が同じ脚本を読んでいれば安全です。
私たちのロボットもまた、「いま、ここ」で演じられているその脚本を読み取れるようにならなければなりません。
これが私たちにとって重要である理由
私たちの使命は、礼儀作法をハードコードすることではありません。
それを観察し、抽出し、安全に学習させることです。
だからこそ、私たちはエンドツーエンドのテレオペレーション、動作から意味へとつなぐデータパイプライン、そして単なる物理現象ではなく社会的文脈の質感を反映したデータセットの構築に重点を置いています。
それこそが、「人を避けるだけのロボット」と「人の中に自然に溶け込むロボット」との違いなのです。
お問い合わせください
実証実験、共同研究、またはカスタム統合にご関心がありますか?
以下までお気軽にご連絡ください:contact@noitomrobotics.com