ロボットが解決策となるのは──人間側も整えたときだけ

ノイトム・ロボティクス
最高マーケティング責任者(CMO)
ロッチ・ナカジマ 著
私たちが直面している課題は同じです。──「仕事の量に対して、人が足りない」。
「ロボットに任せればいい」と言いたくなるのも無理はありません。
しかし、この10年で私たちが学んだのはこうです。
現場には“魔法の解決策”など存在しない。あるのは、連携して機能するシステムだけだ。
ロボットはその答えの一部です。
── すべての答えではありません。
「労働力不足」の本当の原因とは
これはひとつの大きなギャップではなく、無数の小さなギャップの集まりです。
誰もやりたがらない夜勤。離職率の高い単調な作業。3週間の訓練が必要なのに、内容が3日ごとに変わる仕事。
そして、締め付けたり緩めたりを繰り返す移民政策。
私たちはそれを「人手不足」と呼び続けていますが、実際にはミスマッチでもあるのです。
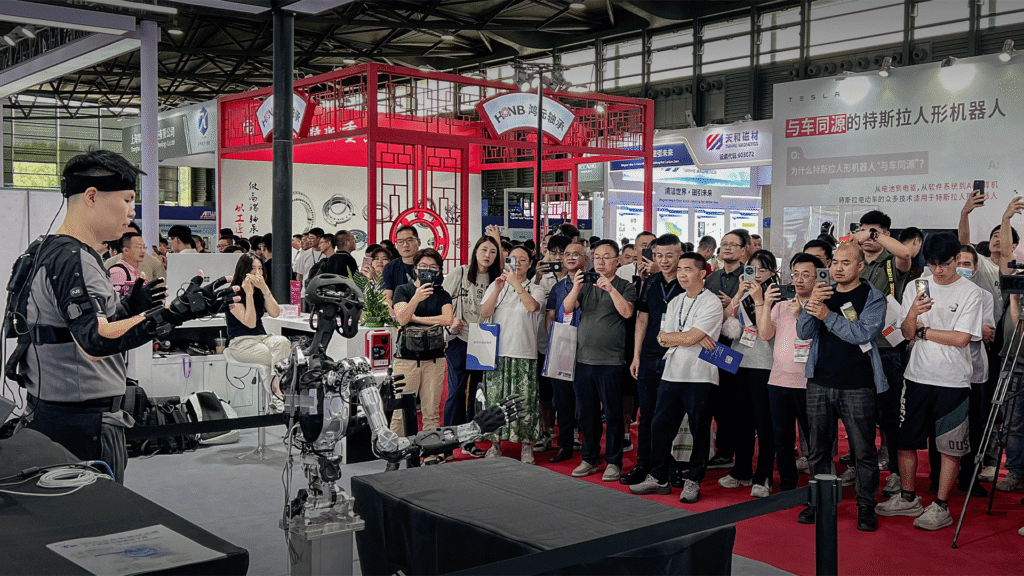
ロボットが“本領を発揮している”現場──それが今です
勝利の鍵は、人を置き換えることではなく、仕事そのものを再設計することです。
- 退屈で、汚く、危険な作業はロボットに任せ、チームが価値創出と安全確保に専念できるようにする。
- 建物全体を自動化するのではなく、まずは1本のラインを標準化すること。
「ピッキング → ステージング → 検査」──この流れを確立し、それをコピー&ペーストして展開すればよいのです。 - テレオペレーション(遠隔操作)の支援体制を導入し、熟練オペレーター1人で複数のロボットをリアルタイムに支援・制御できるようにする。
- 作業の過程で適切なデータを蓄積し、明日のモデルが今日の業務から学べるようにする。
ここで強調したいのは──知能とはアルゴリズムだけではないということです。
それは、現実の世界で積み重ねられた多様で複雑な経験そのものです。
視覚、動作、触覚、そして文脈。
それらを同時に取得し、整合させ、学習可能な形にする。
このデータ層こそが、ハードウェアを「役に立つ存在」へと変えるのです。
だからこそ、私の会社の信念は明快です。
「私たちはロボットを造らない。私たちはロボットに知能を与える。」
──具身AIが本当に必要とするデータパイプラインとテレオペレーション基盤を提供することで。
静かなる敵──見えないコストと遅すぎる投資回収
人件費とロボットの本体価格だけを比べれば、錯覚します。
統合、安全対策、トレーニング、保守、ソフトウェア、サイバーセキュリティ──本当のコストは後から現れます。そして、それは確かに存在します。
投資回収(ROI)は“ある”のです。ただし、それは与えられるものではなく、積み上げて得るもの。
問うべきは「ロボットはいくらか?」ではありません。
「それを日々価値を生み出す、信頼性のある観測可能なシステムに、どれだけ早く育てられるか?」──それが本質です。
私がよく使うTCO(総保有コスト)の簡易チェックは、次のとおりです。
- スコープ:自動化の対象は単一の作業なのか、作業セル全体なのか、それともシフト全体なのか?
- 安定性:上流の条件(SKUの入れ替え、照明、レイアウトなど)はどのくらいの頻度で変化するのか?
- サポート体制:このシステムを自社のスキルで維持・運用できるのか?それとも特定のインテグレーターに依存しているのか?
- 安全性と信頼性:拡張する前に、安全で予測可能であることを実証できるか?
「社会的許可(ソーシャルライセンス)」が重要です
自律性は社会の中で育つものです。
つまり、安全性、透明性、説明責任は「第2段階」ではなく、最初の日から欠かせない要素なのです。
十分な安全枠組みを持たずに、学習システムを現実の職場へ投入するのは、信頼を失い、規制を招く最短ルートです。
まずは慎重に始め、すべてを計測・記録し、エビデンスに基づいて拡張していくこと。
それが、信頼と持続性を両立させる唯一の道です。
機能するプレイブック
ギャップを最も速く埋める方法──それはハイブリッド型のアプローチです。
- 仕事を「より良いもの」にする。賃金とともに仕事の質を高める──安全な作業環境、短縮された研修期間、明確なキャリアパスを整備する。
- 人への投資を惜しまない。人と機械が協働するチームのために、リスキリング(再教育)とアップスキilling(技能向上)を進める。──単なる「管理者」ではなく、トラブルを解決できるオペレーターを育てるのです。
- 移民政策を戦略的に活用する。教育・訓練の効果が現れるまでの間、深刻な人手不足を補う即効性のある手段として機能させる。
- 変動の少ない領域からロボットを導入する。まずは反復性の高い作業から着手し、そこから段階的に適用範囲を広げていく。
- 現場を計測可能な状態にする。オペレーター対ロボット比、1時間あたりの介入回数、平均復旧時間(MTTR)を測定する。これらの数値が右肩下がりに推移していれば、あなたの現場は勝っているということです。
ヒューマン・イン・ザ・ループ(人間の関与)は妥協ではない──それは成長へのランプ(踏み台)である。
私たちは「自動運転車」からこの教訓を得ました。
スケーラブルなモデルとは、**“魔法の完全自律”ではなく、人間が関与するインフラ(Human-in-the-Loop)**なのです。
ロボティクスも、まさに同じ道をたどっています。
遠隔支援を前提に設計し、介入データを取得し、それを学習へと還元する。
このサイクルこそが、自律性を着実に積み重ねていく仕組みです。
だからこそ、私たちはエンドツーエンドのテレオペレーション環境とマルチモーダル・データパイプラインを構築しています。
──なぜなら、信頼できる自律性への道は「人間とロボットの優れた協働システム」を経由してこそ開けるのであって、それを回避しては到達できないからです。
なぜ「データ層」が何度も登場するのか――そして、なぜそれが今すぐに重要なのか
汎用ロボットは、単一センサーで集めた“おもちゃのようなデータセット”からは学べません。
必要なのは、視覚・動作・触覚・環境情報を同期させ、学習とクロスエンボディメント転移のために整合させたデータストリームです。
これこそが、私たちのチームが取り組んでいる領域であり、だからこそ私たちは高品質なデータ収集とテレオペレーションのために設計された専用プラットフォームとパートナーシップを結んでいます。
正しいデータを構築できれば、人間のデモンストレーションと信頼できるロボットの間の距離を劇的に縮められる。
それが私たちの目指す未来です。
結論はこうです。
未来は「ロボットか人間か」ではなく、**「ロボットと人間が、良い設計で共に働く世界」**です。
機械が“人手不足を解決できるか”という問いは、もう終わりにしましょう。
これから問うべきは、人とロボットが互いを高め合うチームを、どれだけ早く構築できるかということです。
お問い合わせください
実証実験、共同研究、またはカスタム統合にご関心がありますか?
ぜひお気軽にご連絡ください:contact@noitomrobotics.com