

洞见
来自 Noitom Robotics 的最新观点
以洞见,让人类与机器人共成长
从机器人与具身智能的前沿突破,到我们在动作捕捉与遥操作项目中的实践经验——汇聚塑造具身智能未来的趋势、工具与思考。
机器人需要的不只是代码——它们更需要经验
探索真实世界的多模态数据如何让机器人从“被动响应”走向“具身智能”,
让 AI 获得有“经验”的智慧。
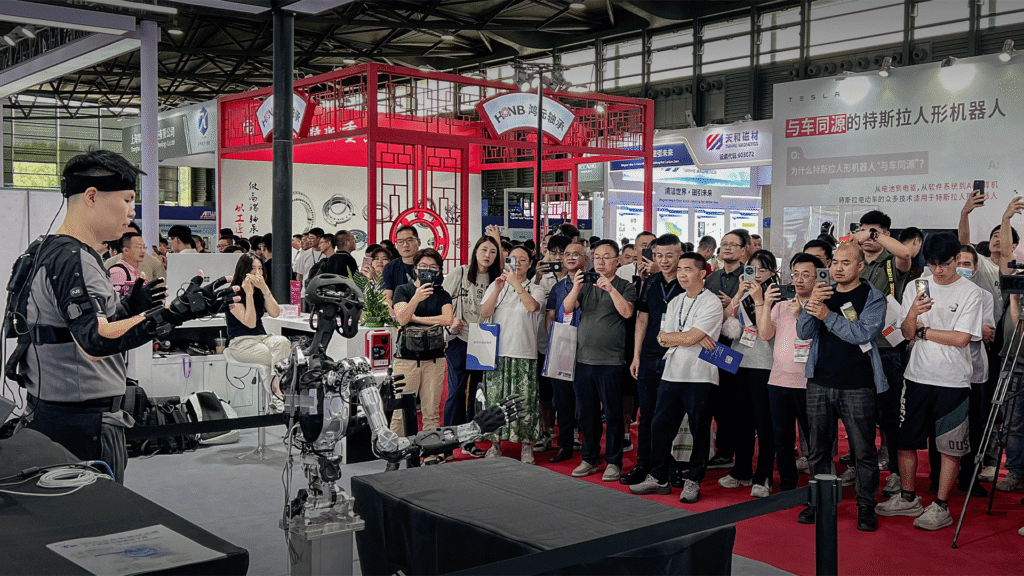
Adam-U:为具身智能打造的人形数据采集平台
在 2025 世界人工智能大会(WAIC 2025)上,
Noitom Robotics 发布 Adam-U —— 一款专为具身智能(Embodied AI)设计的人形机器人数据采集平台。
多模态数据:通向通用机器人之路的关键环节
为什么多模态数据是通向通用机器人的道路上缺失的关键环节?了解 Noitom Robotics 如何通过具身智能框架构建可迁移的数据体系,助力机器人跨场景学习与泛化。
人形机器人&具身智能的未来“呼叫中心”
就像自动驾驶汽车一样,
当下的机器人与具身智能系统依然依赖隐形的“人类呼叫中心”与远程操作员。
了解为什么混合式 人机协作模型 是当下最现实的过渡阶段

为什么机器人必须理解“社会语境”?
就像自动驾驶汽车一样, 当下的机器人与具身智能系统依然依赖隐形的“人类呼叫中心”与远程操作员。 了解为什么混合式 人机协作模型 是当下最现实的过渡阶段。
Fixing the human side for Robot solutions ZH
Robots aren’t a silver bullet for labor shortages. The real answer is hybrid systems: humans and machines working together, supported…